
<サンプルシステム実装はこちら>
1. @factory が提供するビジョン:フィジカルAIの実用化のための研究・開発基盤の創成
@factory は、汎用的なフィジカルAI技術を、特定の利用領域(工場・製造業)に適用して有効性を検討するための基盤開発を目的としたオープンソースプロジェクトです。研究成果として誕生したフィジカルAI技術は、いよいよ実際の社会で役に立てる時がやってきました。そのためには、個々のアルゴリズムを開発するだけでなく、それが社会課題に適用されて役に立つことを確認する必要があります。
この基盤は、フィジカルAIを実際の課題に適用してその有効性を迅速に評価できるようにすることを目標としています。そのために、研究開発のワークフローに配慮し、NVIDIA Isaac Sim上に仮想工場やロボットを個別に定義するのではなく、工場操業が可能で、かつ、少ない労力で仮想工場やロボットを交換できるように配慮したプラグイン構造を持つ統合環境となっています。すなわち、@factoryとは、特定の現実問題にフィジカルAIを適用するための研究、開発を効率化するための統合シミュレーション実行環境です。
2. 今回のリリース
GitHub上の3つのリポジトリからなる、@factoryのサンプルシステム一式を公開しました。
@factoryを構成するリポジトリは、中核となるat_factoryと、種々の仮想工場やロボット定義ごとに作成され、at_factoryにプラグインされるものから成り立っています。今回は、at_factoryレポジトリと、サンプルとなる仮想工場と加工機械を定義するリポジトリ、モバイルアームロボットMelonを定義するリポジトリmelon_ros2を公開します。
これらを起動することにより、NVIDIA Omniverse/Isaacを用いて、AIロボットが作業できる工場が仮想空間内に作られます。このロボットは、ROS通信によって、外部から制御することができます。
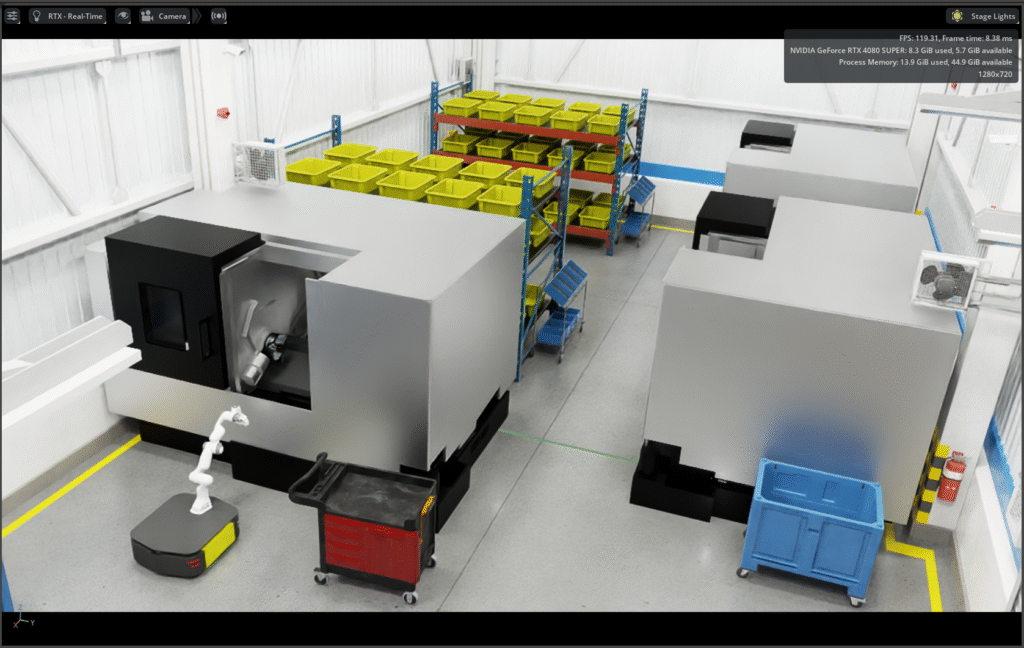
これを用いて、工場で作業するAIロボットを制御するための、フィジカルAIを用いた制御システムを、実際の工場を用いることなく構築することが可能になります。この環境により、フィジカルAIによって実現すべき機能と、その評価基準の明確化を図ることができようになり、フィジカルAIの検討には非常に有効な基盤が誕生します。
また、逆に、工場へのAIロボットの導入後の姿を具体的に見ることが可能になり、AIロボットの活用方法、効果をきちんと評価できるようになります。たとえば、VRゴーグルを用いて、工場内を視察できます。また、実際の工場を用いずに、あらかじめ仮想環境でロボット制御ソフトウェアの開発を進めることが可能になります。これは、今後、製造業でAIロボットを活用するときに、重要なツールとなります。
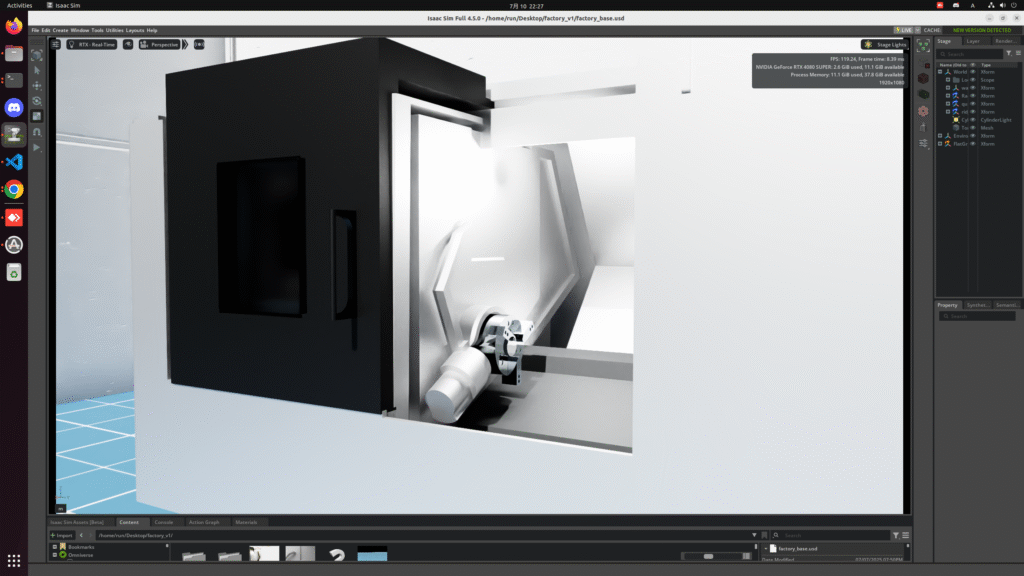
これまでに、実際の工場を見学し、実際に運用されているものに近い仮想工場を構築しました。また、CNC旋盤のモデルも作成し、実際に部材をローディングできるようにしました。
さらに今後も、この仮想工場で働くロボットとその制御機構を継続的に開発します。たとえば、自律移動する双腕ロボットを用い、部材の入荷から製品出荷まで全自動で操業できる工場の構築を進めてまいります。
3. @factoryの核:プラグイン可能な「仮想工場」プラットフォーム
今回リリースしたシステムの中核は、at_factoryレポジトリから提供され、docker形式で実行される、at-factory-base機構です。これは、NVIDIA Isaac Sim上で仮想工場を統合的に実行できるようにするプラットフォームとして機能します。

この共通フレームワークは、Isaac Sim上の簡単なプログラミング機構によるプラグイン機能を持っており、開発者は必要な要素を「差し込む」だけでシミュレーション環境を構築できます。
プラグインされる主要な要素
| 要素 | 概要 |
|---|---|
| 工場と工作機械のUSD定義 | 実際の調査に基づいた小規模工場と工作機械のUSD(Universal Scene Description)定義。 |
| 作業ロボットのUSD定義 | そこで働くロボットのUSD定義と、摩擦力などの物理的な最適化情報。 |
| ロボットを制御するためのサンプル | AIアルゴリズム開発の足がかりとなるサンプルアプリケーションと制御ロジック。 |
これらの定義(アセット)は、共通フレームワークから独立しており、段階的に改良版や新規版を公開していくため、ユーザーは常に最新かつ多様な環境を利用可能です。
4. at-factory-base docker概要
at_factoryレポジトリは、Isaac Simを用いて仮想工場のシミュレーションを実行する機能を持ったdockerである、at-factory-baseを作成するために必要なファイルがすべて含まれています。Isaac Sim開発者が抱える「ファイルをどこに置くか」「ロボットをどう導入するか」といった初期の悩みを解消するため、at_factory は開発に必要なインフラの具体的な 「枠組み」を提供します。
- Dockerによる環境統一: Isaac Sim + ROS 2の実行環境をDockerで提供し、環境構築の再現性を保証します。
- ファイル配置の明確化: シミュレーションスクリプト、ログ、データなどの永続データ(
isaac-sim/)や、プラグイン(plugin/)をどこに配置すべきか、明確なディレクトリ構成を提供します。 - 自動アセット導入機構
finstall: 開発者が外部で作成・公開したロボットプラグインを、適切なファイルパスに自動で配置し、Docker環境内での活用をスムーズにします。
at-factory-baseを基盤として構成されるat_factoryシステムを利用すれば、開発者は「インフラの構築」ではなく、「複雑な工場アプリケーションの実現」という本質的な課題に、すぐに挑戦できるようになります。
5. 工場定義サンプル
今回のリリースに含まれる仮想工場の定義は、できうる限り現実的な条件で工場運営のシミュレーションが行えるように配慮して設計されています。実際の工場見学を複数回行い、その特徴を反映しています。
工場で運営する加工機械として、CNC旋盤を実現しています。チャック構造を正確に再現し、ワークのローディング、アンローディングが実行できるようになっています。
開発チーム:
・グェン タン アン
全体アーキテクチャ設計、開発
・吉村渉
工場、工作機械、ロボットのデザイン
・杉本諭哉
ロボットプログラム開発
・田胡和哉
プロジェクトとりまとめ