
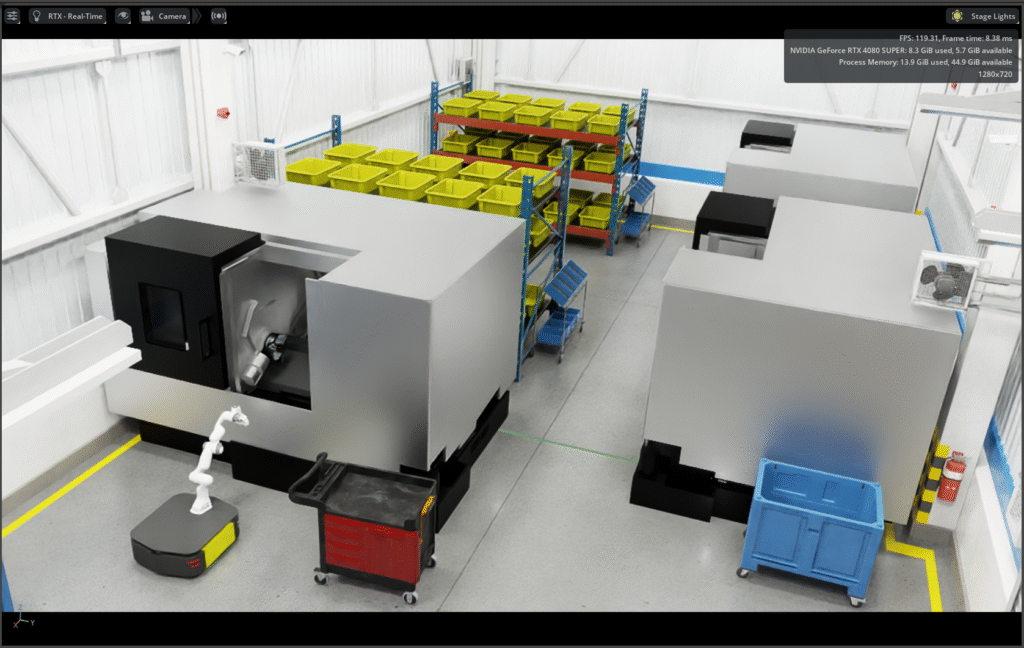
@factoryプロジェクトでは、工場を例にとり、ロボット用物理AIの研究開発環境を構築しています。具体的には、NVIDIA Omniverse/Isaacを用いて、AIロボットが作業できる工場を仮想空間内に作っています。このロボットは、ROS通信によって、外部から制御することができます。
これを用いて、工場で作業するAIロボットを制御するための、物理AIを用いた制御システムを、実際の工場を用いることなく構築することが可能になります。この環境により、物理AIによって実現すべき機能と、その評価基準の明確化を図ることができようになり、物理AIの検討には非常に有効な基盤が誕生します。
また、逆に、工場へのAIロボットの導入後の姿を具体的に見ることが可能になり、AIロボットの活用方法、効果をきちんと評価できるようになります。また、実際の工場を用いずに、あらかじめ仮想環境でロボット制御ソフトウェアの開発を進めることが可能になります。これは、今後、製造業でAIロボットを活用するときに、重要なツールとなります。
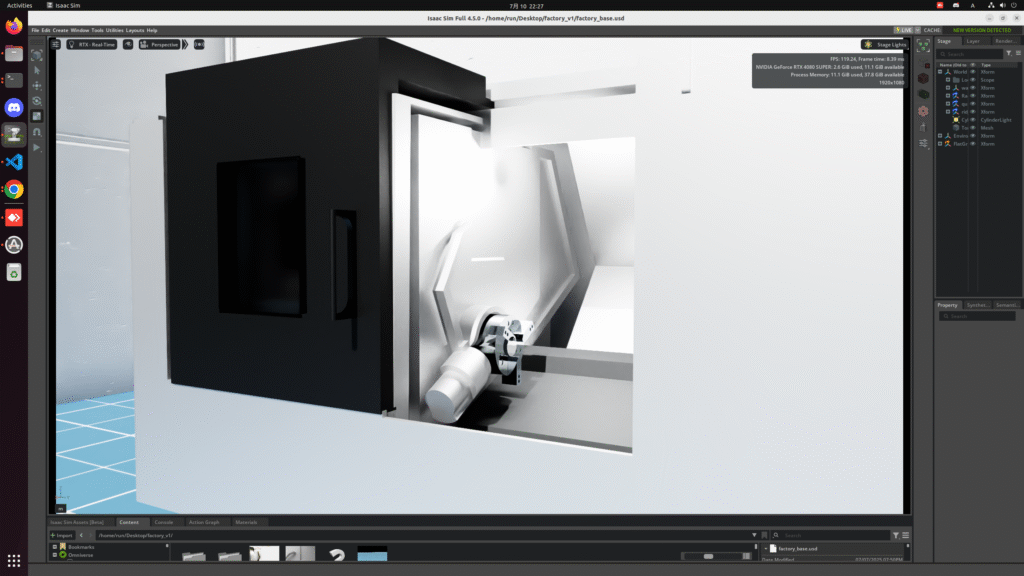
これまでに、実際の工場を見学し、実際に運用されているものに近い仮想工場を構築しました。また、CNC旋盤のモデルも作成し、実際に部材をローディングできるようにしました。近く、GitHubよりUSDの形式で公開する予定です。
さらに、今後、この仮想工場で働くロボットとその制御機構を開発してまいります。たとえば、自律移動する双腕ロボットを用い、部材の入荷から製品出荷まで全自動で操業できる工場の構築を進めてまいります。
また、他の研究・開発者にも呼びかけて、物理AIの開発競技とすることも検討しています!