
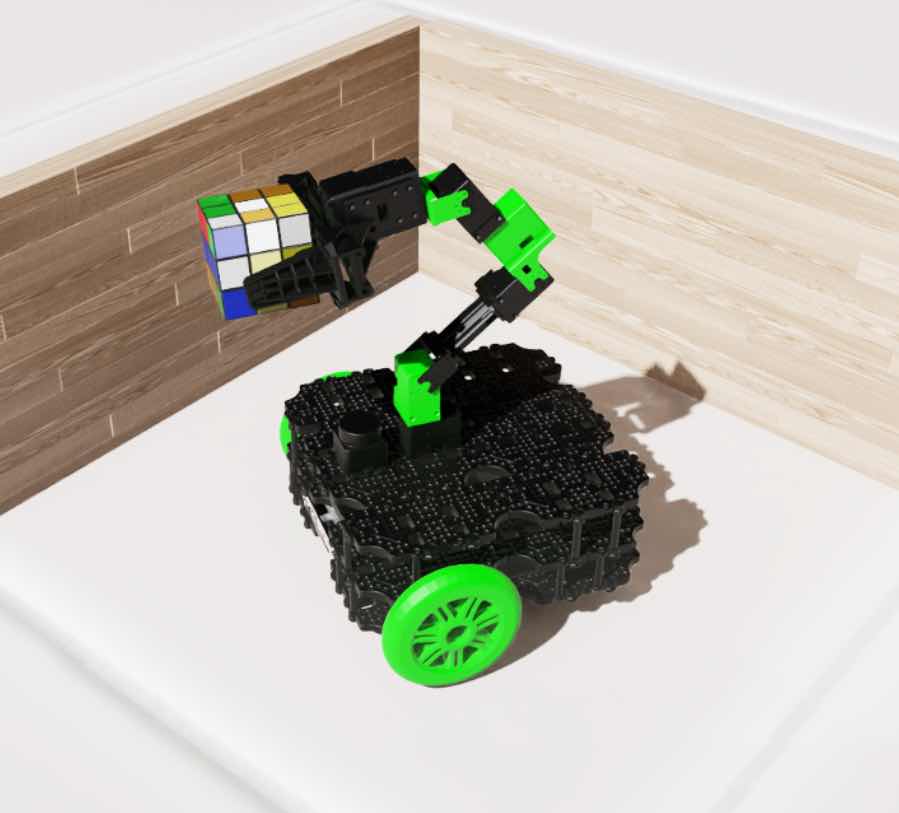
simulation of the TurtleBot3 Lime on Isaac Sim by using the developed USD
The TurtleBot3 Lime is a next-generation ROS standard robot based on the TurtleBot3 Waffle, equipped with a 6-DOF manipulator, a RealSense depth camera, and a Jetson Orin Nano edge GPU. Its primary purpose is to enable easy experimentation with AI-based robot control. Recent advances in AI technology have been remarkable, and applying it to robot control is enabling many functions previously thought impossible, such as Vision-Language-Action(VLA) model based robot control. However, progress has been so rapid that the infrastructure for research and education in AI-based robot control technology has not kept pace. The TurtleBot3 Lime was created to address this situation.
Recently, NVIDIA has released Omniverse, a digital twin realization environment, and Isaac, an AI robot development environment utilizing it. We believe that making the TurtleBot3 Lime compatible with the Omniverse/Isaac environment will help achieve this goal.
We are now releasing the USD definition for TurtleBot3 Lime, aiming to enable users to try out the wide range of AI robot-related functions provided by Isaac components including Isaac Sim, Isaac ROS, Isaac Perceptor, Isaac Manipulator, and Isaac Lab.
Previously, it had not been possible to comprehensively test Isaac functions on a single robot model. Now, by using the TurtleBot3 Lime, which has been realized as a compact mobile arm robot, it is possible to try out many of Isaac’s functions all at once.
The execution environment for TurtleBot3 Lime in Isaac Sim has been released on GitHub. All you need is a GPU to run it, so we encourage you to give it a try.